
Cuatro cazas F-16 noruegos están atravesando el cielo de las Islas Lofoten, después de que despegaron para atender a un llamado de interceptación contra blancos yendo en dirección a la Base Aérea de Andoya. Los F-16 fueron equipados con un IRST AN/AAS-42.
Volando abajo del nivel de formación de trillas de condensación (30 mil pies), los pilotos noruegos inmediatamente detectaron los seis "blancos". Eran Su-27 aproximándose de frente en la misma altitud, volando un patrón de barrido de cazas tipo "pared de Flanker" y proyectando su gran envoltura de búsqueda hacia el frente. Presumiblemente, un grupo de ataque vendría inmediatamente atrás.
Los F-16 volaban con sus radares desconectados y redujeron la potencia del motor para que no fueran visualizados por los IRST de los Su-27, que se sospecha que operen en la banda 3-5 m, optimizados para detectar firmas de post-combustores. Como el sensor AAS-42, que funciona en la banda 8-12 µm detecta la firma de fricción del aire en el fuselaje, los F-16 fueron capaces de detectar y clasificar la aproximación de los Su-27 antes de que sean detectados. Los noruegos realizaron una emboscada furtiva y derrotaron los Su-27 con disparos de AMRAAM en el alcance máximo.
Esta demostración gráfica del potencial ofrecido por cazas equipados con IRST fue demostrado por la Lockheed Martin Tactical Aircraft Systems en Fort Worth, Texas, durante escenarios aire-aire simulados. El desempeño cada vez mayor de los sensores de imagen térmica ha permitido que los IRST rivalicen con el radar como el sensor de elección para muchas aplicaciones aire-aire en cazas y aeronaves de vigilancia.
La operación pasiva de los IRST tiene la ventaja de la ocultación. La ventaja de formar imagen de alta resolución también ayuda en la identificación visual (VID) la larga distancia. La pérdida de precisión en la información de alcance puede ser parcialmente superada con la integración de un telemetro láser o con un radar láser - LADAR.
El IRST, o Sistemas de Búsqueda y Rastreo Infra-Rojo (Infrared Search and Track) es un sensor pasivo, que usa la fuente de calor emitida por el blanco para generar datos para el sistema de armas de una aeronave (u otra plataforma como navío o batería antiaérea)
El uso de sensores que detectan calor para búsqueda de blancos por aeronaves de combate es tan antiguo como lo es el uso de esos sensores para guiado de misiles. Los primeros modelos tenían desempeños limitados, pues no formaban imagen del blanco. Aeronaves de la década de 50 y 60 como F-101 Voodoo, F-102 Delta Dagger, F-104 Starfighter, F-106 Delta Dart, F-8 Crusader y F-4 Phantom ya estaban equipadas con esos sensores, pero con poca utilidad práctica. Eran instalados principalmente en interceptadores cuyos blancos eran bombarderos con gran firma IR volando la gran altitud en cielo claro. También podían ser usados para apuntar misiles guiados por calor.
La F-4C era equipada con un detector IR Hughes S-71N (AN/AAR-4) bajo el radomo del radar, pero que fue subsituído por una antena de alerta radar en los modelos D. El JAS-35F Draken sueco también fue equipado con el AAR-4 en la década de 60.
El F-4E podía usar el sensor Northrop AN/ASX-1 TISEO (Target Identification System Electro-Optical) instalado en la raíz del ala izquierda como IRST. El TISEO era apuntado por el radar y podía identificar aeronaves además del alcance visual para disparo de misiles AIM-7 Sparrow. En pruebas en el desierto el TISEO permitía identificar la larga distancia contactos en el radar volando bajo, en el caso aeronaves F-111, y atacarlas la larga distancia.

Un sensor IR AAS-15 fue instalado en la mayoría de los F8 U-2N Crusader a partir de 1960, apareciendo como un salida al frente del cockpit de la aeronave.

Los rusos tiene una historia más larga y consistente de uso de IRST. El Mig-23 tenía un buscador de calor TP-23, TP-23-1 o TP-23M (Mig-23ML) bajo la nariz era capaz de detectar un F-16 o similar a 35-40 km o un TP-26 apuntado para tras con alcance de 60 km.

Los primeros modelos de la F-14 Tomcat fueron equipados con un detector IR AN/ALR-23 movil bajo la nariz, que podía ser apuntado por el radar o usado independientemente para barrer áreas no vigiladas por el radar. El detector de Antimoniato de indio era enfriado por un sistema de criogenio de ciclo Stirling autónomo.
En la práctica, el AN/ALR-23 era inefectivo, y fue sustituido por el Northrop AN/AXX-1 Television Camera Set (TCS), que era una cámara de TV estabilizada de alta resolución de campo de visión (FOV) ancho y angosto. Las imágenes aparecen en la pantalla del piloto y en el panel del WSO. Ese sistema puede ser usado para localizar un enemigo visualmente la larga distancia e identificarlo, evitando fuego amigo. Los primero TCS fueron incorporados en los F-14 Block 125 al inicio de la década de 80. Un nuevo TCS está siendo desarrollado
El TVC permitía inspeccionar blancos a larga distancia antes de enfrentar, por lo menos de día y con buen tiempo. La incapacidad de determinar si el blanco era amigo o enemigo era una de las limitaciones del misil Sparrow en Vietnam.
Los pilotos del F-14 Bombcat percibieron que el FLIR del sensor LANTIRN era más eficiente para chequear blancos a larga distancia que el TCS. El FLIR tiene zoom de 4, 10 y 20 veces y puede ser apuntado 150 grados fuera del eje de la aeronave. Con el datalink FTI, la imagen del FLIR puede ser transmitida la larga distancia junto con imágenes del capullo de reconocimiento TARPS y del TCS.
Los primeros IRST eran simplemente cámaras FLIR (Forward-Looking InfraRed) con un simple sistema de rastreo y punteria. Los proyectos recientes tienen mayor capacidad, incluyendo un gran volumen de búsqueda, adquisición autónoma de blancos distantes, rastreo preciso de blancos múltiples, tasa de aviso de blancos falsos muy bajo en todas las condiciones, estimación de distancia pasiva, calidad de imagen similar a las cámaras de TV de alta definición, e integración con otros sensores y armas de bordo.
La diferencia entre un FLIR y un IRST es que el último muestra datos de fuentes de calor del mismo formato de una tela de radar pudiendo informar distancia que también se estuviera usando un telémetro láser láser o por estimativa. El FLIR es un sensor de calor que forma imágenes el frente para que sean mostradas al piloto y con uso en navegación y adquisición de blancos en un FOV angosto. Los IRST actuales son capaces de formar imágenes de alta resolución pudiendo ser usados para adquisición con un FOV angosto y para identificación visual.
Los IRST actuales usan tecnología de arreglo de foco plano (FPA - Focal Plane Arrays) que son varias cámaras de imagen térmica formando un conjunto único. El sistema es más liviano, menor, necesita de menos enfriamento, es más confiable y, potencialmente, más barato que los sistemas electromecánicos antiguos.
El ASRAAM y AIM-9X fueron los primeros misiles aire-aire (AAM) a que empleen la tecnología de FPA en un arreglo de 128 x 128 sensores. Las imágenes de onda larga con sensores de HgCdTe prometen aumentar el alcance de detección. Para aplicaciones de ondas cortas, los arreglos de PtSi son otra alternativa. La cabeza de búsqueda de los misiles guiados por IIR actuales pueden formar una imagen del blanco. El misil francés MICA puede tener su sensor de búsqueda usado como IRST bajo comando de la mira del casco del piloto o del radar.
Los principales requerimientos para los IRST de cazas son:
- Búsqueda y rastreo automático de la firma IR de aeronaves en vuelo la larga distancia en un gran campo de visión y en todos los aspectos (mirando para encima, para bajo, misma altitud
y contra ruido de fondo).
- Capacidad y asistencia en el enfrentamiento de blancos múltiples simultáneos y en el lanzamiento de armas en un ambiente de contramedidas electrónicas pesado.
- Salida de datos para fusión de sensores, para aumentar la seguridad y confianza, mejorar la detección, reducir ambigüedad, y mejorar el desempeño de radar, armas y sistemas de guerra electrónica.
- Mostrar imágenes de alta resolución para identificación visual (VID) de blancos al piloto.
- Tener un modo de auxilio a aterrizaje nocturno y condiciones de tiempo adversas.
- Tener un modo de navegación y evitación de terreno.
- Tener un modo aire-tierra para localización y designación de blancos mirando hacia bajo.
- Mostrar informaciones relevantes y vídeo para presentación en el HUD, HMD y HDD.
- Sensor auxiliar en caso del radar estar sufriendo interferencia.

Un FLIR de 3ª generación mostrando un C-141 aterrizando la 20 km de distancia.
El desempeño de un IRST depende de una combinación de factores. El número máximo de blancos que pueden ser rastreados, simultáneamente, está directamente relacionado con la capacidad de procesamiento Aunque el número real de blancos verdaderos en el campo de visión del sensor pueda ser bien pequeño, una gran capacidad de procesamiento es necesaria para asegurar que ella no será cancelada en la presencia de "clutter", como márgenes de nubes. En cada caso, la precisión de lo rastreo debe ser optimizada para apoyar funciones como fijación de cabeza de búsqueda de misiles o fusión de sensores.
El alcance de detección es la distancia en que la firma del blanco excede un cierto umbral, que es normalmente determinado como 90-95 % de la probabilidad de detección. Algunos IRST construyen una historia de rastreo, usando asociaciones entre varias detecciones, antes de declarar el resultado al sistema de armas. Esta "declaración de alcance" debe ser la mayor posible para preparar la respuesta en la forma de lanzamiento de armas, lanzamiento de contramedidas o maniobras de escape.
El campo de visión (Field Of Vision - FOV) que el usuario seleccionó en el campo de visión total (Field Of Regard - FOR) del IRST depende de las circunstancias. Para una cobertura máxima, el FOV debe ocupar todo lo FOR. Con un valor menor puédese reducir el tiempo para completar una barrido, con una mayor tasa de actualización. Otra alternativa es permitir el uso de tiempo de integración mayor en el detector, con un mayor alcance contra un cierto blanco. El objetivo es tener una tasa de alarma falsa de menos de cinco por hora en un FOV de 30 x 50 º.
TISEO
Un sistema electroóptico utilizado al término del conflicto de Vietnam fue el televisor telescópica estabilizado. Una de las razones fue la necesidad de identificar visualmente las aeronaves antes de disparar un arma. Los aviones estadounidenses eran grandes y estaban en desventaja contra los vietnamitas GSI pequeñas y se sigue latente. La generación siguiente fue aún mayor con el F-14 y F-15 es mayor que el F-4. Los estadounidenses se encontraban en el ridículo de los sistemas que utilizan armas de largo alcance y obligados a combatir a corta distancia. El televisor telescópica invertida esta situación, lo que permite la identificación visual más allá de la visión humana.
La primera cámara de televisión estabilizado telescópica a entrar en operación fue el destino de identificación AN/ASX-1 Set Electro-óptica (Tiseo) Northrop. El resultado del programa fue Tiseo Prisa Rivero durante el conflicto de Vietnam. El Tiseo entró en servicio en los años 70 en la USAF, el F-4E inicialmente y luego se instalará en el F-15, pero fue cancelada.
La instalación de Tiseo el F-15 fue abandonado en 1972. En 1987 un proyecto similar llamado "Eagle Eye III" con un sensor que se monta en la raíz del ala izquierda en el mismo lugar preparado para tomar el Tiseo. El sensor se 40 cm de largo y 10 cm de diámetro. Las imágenes de televisión se muestran en la pantalla del radar. El sensor fue cancelado por falta de fondos y algunos combatientes empezaron a tomar en la estructura de Leopoldo, junto con gafas de HUD.
El Tiseo se instaló en la última producción de F-4E y adaptado a los modelos más antiguos. Las imágenes se muestran en la pantalla del radar de la OSM. El Tiseo puede ser nombrado por el APQ-120 de radar y una actualización podría ser nombrado por el sistema de navegación para señalar los objetos en el suelo. Fue empleado en la final de la guerra de Vietnam con éxito. El F-4E iraní equipadas con Combat árbol Tiseo utiliza Tiseo y para detectar, identificar y atacar a los iraquíes MiG-21 con misiles Sparrow de largo alcance.
En las pruebas en el desierto, las tácticas de penetración de la F-111 fueron interrogados después de estos aviones fueron detectados con facilidad, identificado y eliminado "por largo GSI distancia simulados por aviones de combate F-4E equipado con Tiseo.

El Tiseo está instalado en la raíz del ala izquierda del F-4E.

Una imagen de un Tiseo a partir de un F-4E iraní que muestra a un Mig-23 iraquí en el momento de un AIM-54 Phoenix detona a tu lado. La pelea tuvo lugar el 25 de septiembre de 1980 con el misil de ser disparado por el Mayor Naghdi. El F-14A estaba volando a 6.000 metros ya 8 km del Mig-23, cuando Phoenix fue despedido en el MiG acerca y maniobras con violencia. En el mismo combate un Phantom II derribó un MiG-23 con un Sparrow con un disparo a 5 km. A los pilotos iraníes les gustaba el Tiseo del F-4E con excelentes resultados y espera recibir el AN/AX-1 TCS en sus F-14, pero la revolución impidieron la instalación se llevaría a cabo después de que el avión se reciben.
AN/AXX-1 Television Camera Set (TCS)
El Tiseo fue modificada por la Marina de EE.UU. como TVSU (Visión Unidad de Televisión) y probado entre 1977 y 1978 con gran éxito. Northrop ha sido contratado para adaptarlo para su uso en la guerra y volvió AN/AXX-1 Televisión Cámara conjunto (TCS).
El TVSU se utilizó en la segunda fase de la Aceval ejercicios y mostró la importancia de que TVSU equipado el F-14 para 185 misiles disparados por vía electrónica. El TVSU permitió la identificación visual de la larga distancia de 175 disparos. El TCS primero se incorporaron al F-14 Bloque 125 en los años 80.
El TCS se compone de una cámara de televisión de campo constante, de alta resolución de visión (FOV) de 1,42 grados cuadrados a la búsqueda y captura de otro de 0,44 grados para la identificación de objetivos. Las imágenes aparecen justo por encima de la pantalla del radar del piloto y el panel de la OSM. TCS explora un área de 15 grados a cada lado del eje de la aeronave puede ser dirigida por el radar (AWG-9 o de 71 APG), el IRST del F-14D independientemente o de forma manual por la OSM. La electrónica tenia un algoritmo de seguimiento del blanco automático que aumenta la capacidad de las contramedidas electrónicas contra el radar que no se rompa la meta. maniobras de las aeronaves haciendo "beaming" seguido fácilmente.
TCS se utiliza para localizar a un enemigo a larga distancia y visualmente identificarlo y evitar el fuego amigo. El TCS permite que los objetivos de control a larga distancia antes de participar al menos un día con buen tiempo. TCS no tiene el alcance del radar, pero de gran ayuda en la identificación de lo que es importante cuando las reglas de combate se especifica que es necesario identificar visualmente el objetivo antes de disparar. TCS les permite ganar segundos cruciales en el combate. TCS, y Tiseo, identificado un F-5 a cerca de 18 kilometros, un C-130 de 60 kilómetros, 70 kilometros un F-111, un DC-10 a 135 kilometros.
Un ejemplo práctico de la utilización de ECT es utilizar AWG-9 de radar para la detección de un Tu-22 Backfire y puntos de cámaras de televisión con el radar. La aeronave está identificada y de largo alcance F-14 se inicia el ataque con misiles Sparrow iluminar el objetivo con el radar. El Tu-22 reacciona con sus bloqueadores de radar de gran alcance y F-14 pierde traqueamento el objetivo, pero aún conserva el TCS nombró a la meta de radar y sigue iluminando el destino correctamente con un radar de haz estrecho.
El TCS también se utiliza para evaluar el ataque contra objetivos que vuelan demasiado cerca, el ataque es a la batalla de evaluación de daños.
Dependiendo de las reglas de enfrentamiento permiten cámaras de televisión para la identificación visual a una distancia 7.3 veces mayor que el campo visual. Mediante el seguimiento de la meta, el piloto puede ver que está haciendo maniobras ofensivas y defensivas, o si se trata de disparar misiles. Las imágenes se graban para el análisis posterior de vuelo.


El TCS utiliza dos televisores vindicon, con un zoom zoom y una con el lado estrecho.

El TCS se compone de dos Asambleas armas reemplazables (MEF), el telescopio y el cuadro negro con la electrónica. Las dos cámaras están en un montaje móvil en el campo de visión de 30 grados en el eje de la aeronave. El sensor se mueve a 30 grados por segundo y se estabilizó en 150 grados por segundo.

En el F-14D TCS se instala junto con el IRST. Originalmente el F-14A tenía una serie de AN/ALR-23 sensores infrarrojos en el sitio de TCS, pero resultó poco fiable y fue reemplazado por TCS. El ALR-23 tenían un alcance limitado, con los datos de mala calidad y las fuentes de calor falsos detectados. La tecnología de la PRIMERA mejorado con una mayor fiabilidad y un mayor alcance.

Los detalles de la imagen de TCS con un F-14 como un objetivo.

Imagen de ECT durante un partido contra un libio Mig-23 en el Golfo de Sidra el 4 de enero de 1989. TCS es un sistema de mejora visual que se puede identificar un tipo por la caza a unos 24 kilometros.

Imagen del TCS de un Tomcat del VF-33 de uno de dos MiG-25PD libios encontrados el día 24 de marzo de 1986.

La USAF pretende instalar el AAS-42 en un pod para ser usado en el F-15 Eagle. El pod será instalado en el centerline.
PIRATE
Los proyectos de IRST europeos, fuera los sistemas rusos, fueron liderados por el consorcio EUROFIRST liderado por la Thales Optronics de Reino Unido (ex Pilkington-Thorn Optronics), FIAR (Italia) y TECNOBIT (España). El equipo está desarrollando el IRST PIRATE (Passive Infra-Red Airborne Track Equipment) como complemento del radar del Eurofighter Typhoon, a través de un contrato suscrito en 1992. Thales fue responsable por la autoridad técnica y software, a FIAR es responsable por la gerencia del programa además de la integración y cualificación y la Tecnobit es responsable por el apoyo logístico.

El PIRATE esta instalado en el lado izquierdo del Eurofighter Typhoon el frente de la cabina. El PIRATE es integrado con el AIS (Attack and Identification System) del Eurofighter.
El sistema es refrigerado al agua con peso de 60 kg y volumen de 45 litros, con consumo de 550 W. El uso de sistemas ópticos de alto desempeño atermalizados, un detector de Imagen infrarrojo (IIR) de 2ª generación altamente sensible, que barre en la banda 3 la 11 µm en dos bandas (3-5 µm y 8-10 µm), y un algoritmo avanzado - con más de 190.000 líneas de código ADA - permite que el PIRATE detecte partes calientes del exhaustor del motor y superficies calentadas por el roce con el aire. Al superenfriar al sensor, aún pequeñas variaciones de temperatura pueden ser detectadas la larga distancia. Aunque ningún límite superior fue definido, la distancia de 150 km es aceptada, y la típica es de 50 a 80 km. En las pruebas el PIRATE detectó aeronaves Tornado y MiG-29 de más de 100km.
La salida de datos puede ser direccionada para cualquier MFD del cockpit o HUD. Otras imágenes pueden ser generadas en el HMD, pudiendo funcionar como FLIR o IRST. El uso de técnicas de procesamiento mejoran la salida de datos, mejorando la resolución de la imagen de blancos.
El fabricante afirma que el sistema es capaz de mostrar imágenes de alta resolución para identificación visual (VID) de blancos aire-aire y aire-superficie, siendo bastante útil a la noche. El sistema usa procesamiento de señales derivado del Racal-Thorn Air Defence Alerting Device (ADAD), que demostró una tasa de supresión de alarmas falsas muy alta. El PIRATE será integrado con otros sensores de la aeronave para fusión de sensores. También podrá localizar blancos volando bajo y mostrar informaciones de punteria.
Más de 200 blancos pueden ser rastreados, simultáneamente, con varios modos:
- Multiple Target Track (MTT) o rastreo de blancos múltiples de alta velocidad (más de 500, simultáneamente). El sensor barre un volumen determinado del espacio mirando blancos en potencia con precisión de 0.25 µ rad [0.0143 º] en un FOV variable;
- Single Target Track (STT) o rastreo e identificación de blanco único. El sensor hace rastreo de alta precisión para un blanco único designado. La precisión es mayor que lo del radar CAPTOR del Eurofighter;
- Single Target Track Ident (STTI). Realizar identificación visual (VID) con una resolución mejor;
- Sector Acquisition o modo de adquisición acoplado. El sensor barre sobre dirección de otro sensor, como el radar ERC-90 CAPTOR, HMD o RWR;
- Slaved Acquisition. El sensor es comandado vía data link (MIDS) por una plataforma externa, como una aeronave AWACS. Cuando un blanco es encontrado, el sensor pasa para el modo STT, automáticamente.
El uso del PIRATE y MIDS es un método alternativo de detectar sin emitir con radar. El Eurofighter puede permanecer mudo con el MIDS y el IRST detectando blancos sin emitir.
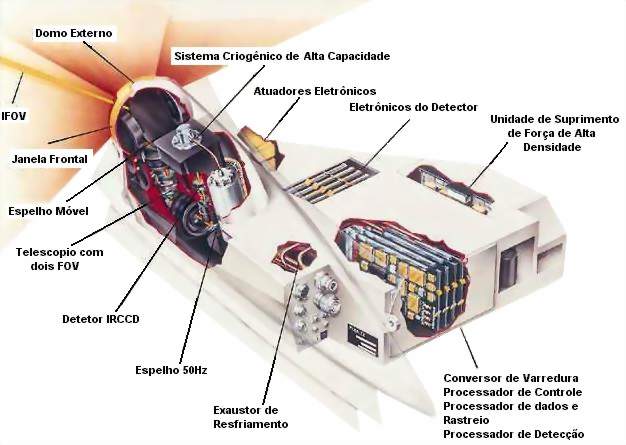
Corte interno del PIRATE. El sistema usa más de 50 circuitos integrados. El sensor IIR es estabilizado para mantener blanco en el campo de visión.
El Pirate tiene un sistema de campo de visión doble para búsqueda de área ancha e imagen de alta resolución de largo alcance, con aplicaciones para operaciones aire-suelo, siendo optimizado para búsqueda y rastreo aire-aire, pudiendo ser usado como señalizador térmico para detección de blancos en el suelo. La imagen obtenida por la posición a la izquierda del cockpit, con 60 grados para bajo posible, es ideal para misiones aire-tierra. La localización lateral limita la efectividad aire-tierra y sensor/designador separado puede ser necesario para operaciones ofensivas. El campo de visión no es tan bueno cuanto un IRST bajo las alas para misiones aire-tierra, y tiene limitación para evaluación de daños de batalla.
En el modo aire-superficie el PIRATE puede funcionar en lo auxilio a la navegación, seguimiento de terreno la baja altitud a la noche y aterrizaje en mal tiempo.
Entre las capacidades adicionales estudiadas que están siendo examinadas están seguimiento e identificación multi-espectral, búsqueda y seguimiento de blancos en el suelo, seguimiento de blancos multiples e integración con con banco de datos de imagen para mejorar la navegación y conciencia de la situación, alerta de misiles en el sector frontal y alerta de misiles de foco ampliado.



Una versión inicial del PIRATE fue probado en el prototipo DA7 para pruebas de instalación en 2001. Pasó a volar en el Falcon 20D junto con otros instrumentos para pruebas a partir de enero de 2002 hasta octubre del mismo año. Las pruebas de vuelo del PIRATE completo en el Eurofighter iniciaron en junio de 2002 con certificación en agosto de 2003.
Sistema de Armas
Niños y Niñas los IRST los gringos lo abandonaran hace años ahora por la ventaja que les da a los aviones rusos tenerlos Y SON MEJORES QUE LOS OCCIDENTALES porque tienen años desarrollando, por tanto el relato inicial es una simple mentira para ingenuos.... pero mejor si se lo creen y así se llevan la brutal sorpresa la misma que se han llevado hace mucho tiempo cada vez que hay maniobras con lo polacos y sus VETUSTOS MIG-29, donde los F-16 son los principales PAVOS, y el F-16 es muy buen avión, pero no es invendible cuando esta en igualdad de posibilidades con un avión Ruso, ahora un SU-27M3 Pierdan toda posibilidad de ganar porque tiene un modernización radical solo vista en los SU-30 especialmente el IRTS así que nanay....
ResponderBorrar