Camiones ambulantes para el ejército estadounidense
Camión para caminar de General Electric. Fuente: wikimedia.org
Vietnam como desafío
Estados Unidos, envuelto en guerras en el sudeste asiático, ha aprendido al menos dos lecciones. El primero es la victoria en tales condiciones sin el uso de armas.la destrucción masiva no se puede ganar. Y la segunda lección es que un terreno extremadamente difícil requiere soluciones extraordinarias. Los vehículos con ruedas e incluso oruga en las selvas de Vietnam estaban lejos de ser siempre adecuados y esto, a su vez, limitaba la movilidad del ejército. El pensamiento de la ingeniería, junto con un presupuesto militar casi ilimitado, dio origen a verdaderos monstruos en los Estados Unidos. Como el Transphibian Tactical Crusher de LeTourneau, un tractor gigante de 95 toneladas construido en solo dos copias en 1967. La máquina en Vietnam, como una cosechadora, trituraba árboles, arbustos, nivelaba montículos y creaba un camino más o menos nivelado para infantería y equipo tradicional. Sin embargo, las dificultades con el transporte de la "trituradora" pusieron fin al desarrollo posterior de la idea. Se necesitaba una solución más elegante. Y lo encontraron en la biónica, es decir, en imitación de soluciones naturales de "ingeniería".La idea de escalar la locomoción del movimiento de caminar al equipo de transporte del Pentágono fue una muy buena idea. Se suponía que debía usar un pedipulador o un análogo mecánico de una extremidad humana (animal) como motor. Y esto no es sin razón: millones de años de evolución han demostrado que es precisamente esta opción de moverse sobre una superficie compleja la más efectiva. Cuando una rueda o una oruga tenga que superar un obstáculo, el pedipulador simplemente lo pasará por encima. Es cierto que en una carretera plana y sólida, todas las ventajas de un andador se desvanecieron: los automóviles yque es esta opción de moverse sobre una superficie compleja la más eficaz. Cuando una rueda o una oruga tenga que superar un obstáculo, el pedipulador simplemente lo pasará por encima. Es cierto que en una carretera plana y sólida, todas las ventajas de un andador se desvanecieron: los automóviles yque es esta opción de moverse sobre una superficie compleja la más eficaz. Cuando una rueda o una oruga tenga que superar un obstáculo, el pedipulador simplemente lo pasará por encima. Es cierto que en una carretera plana y sólida, todas las ventajas de un andador se desvanecieron: los automóviles y los tanques se movían mucho más rápido y gastaban menos energía en ellos. Pero los estadounidenses en Vietnam necesitaban una técnica para caminar para condiciones extremas fuera de la carretera, por lo que estaban listos para aguantar a baja velocidad.
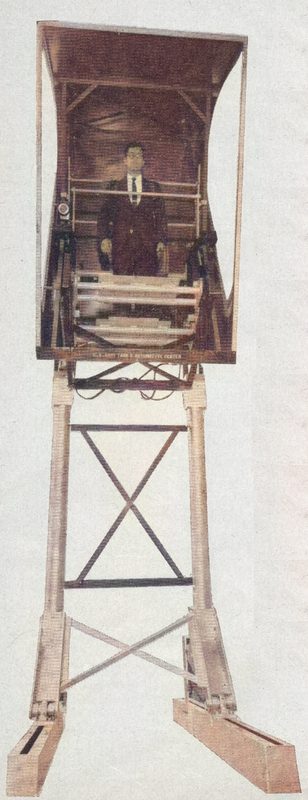
Army Landwalker 1964 / Fuente: wikimedia.org
Uno
de los primeros modelos, aunque pintado en un cartel, fue el Army
Landwalker de 1964, presentado en la Feria Mundial de Nueva York. La
imaginación de los ingenieros se desbocó: equiparon la cabaña de cuatro
patas con dos manipuladores, aparentemente para la evacuación de los
heridos. Sin embargo, tal
técnica no tenía perspectivas reales, simplemente porque las
posibilidades técnicas de implementación estaban ausentes en principio. Los
desarrollos obtenidos anteriormente en un laboratorio especial del
famoso arsenal de Detroit no mostraron las perspectivas más prometedoras
para los pedipuladores. Al
mismo tiempo, el ejército estadounidense tenía una demanda de vehículos
extremadamente transitables, y esto tenía que tenerse en cuenta.
Ralph Mosher y sus camiones
El
ingeniero de General Electric (GE) Ralph Mosher puede considerarse uno
de los pioneros de la robótica militar. Casi todo lo que vemos ahora en
prototipos conceptuales y modelos operativos en los años 60 y 70 fue
implementado por Mosher. Por supuesto, con distintos grados de éxito. A
mediados de los 50, bajo su liderazgo, se crearon los primeros
prototipos de manipuladores controlados a distancia. El trabajo se llevó
a cabo bajo los auspicios del Departamento de Centrales Nucleares de
GE. Se suponía que las máquinas reemplazarían a los humanos en el
territorio de la contaminación radiactiva o simplemente en el trabajo
con sustancias peligrosas. Mosher logró crear manipuladores
sorprendentemente sensibles para su época. Entonces, en 1956, su robot
Yes-Man Teleoperator pudo ayudar a una niña a ponerse / quitarse el
abrigo. Naturalmente, no se trataba de ninguna automatización: el
operador controlaba el sistema de forma remota.El ingeniero pudo equipar
su desarrollo con un sistema de retroalimentación de fuerza, que hizo
posible controlar con mayor precisión el manipulador. Un par de años
después, en 1958, Mosher creará un verdadero manitas industrial GE con
varios grados de libertad. El dispositivo se describió con los
siguientes epítetos:
"Un par de manos con garras, lo suficientemente sensibles como
para empacar huevos, lo suficientemente fuertes como para aplastar
pelotas de golf y lo suficientemente ágiles como para encender un
fósforo".
Teleoperador Yes-Man. Fuente: cyberneticzoo.com
Manitas de GE. Fuente: cyberneticzoo.com
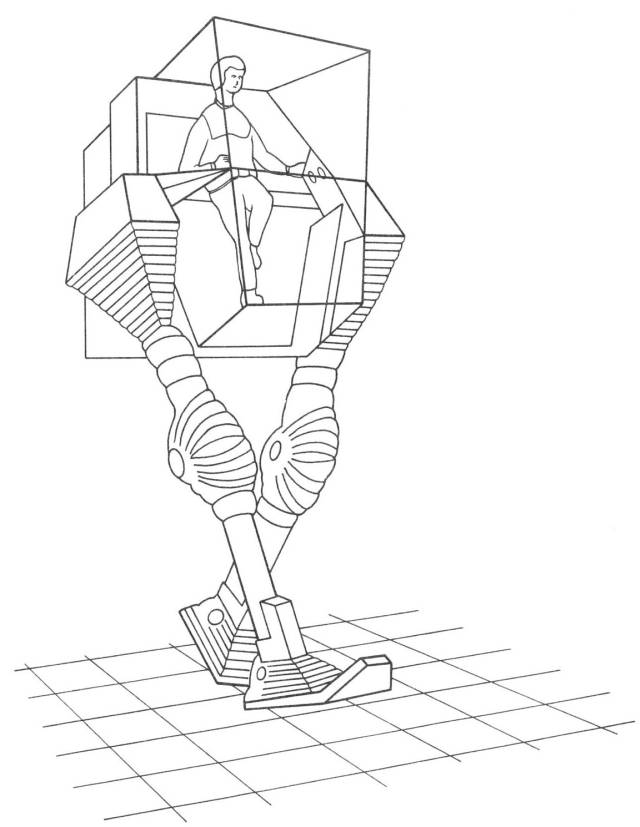
En
1964, el diseñador propuso a todos los interesados y, sobre todo, al
ejército estadounidense, el concepto de un transportador de dos piernas,
cuyo lugar, muy probablemente, solo estaba en una película de ciencia
ficción. El nombre general GE Pedipulator escondió toda una familia de
bocetos, uno de los cuales se convirtió en un modelo real. La criatura
mecánica bípeda, muy similar a la casa de Baba Yaga, con una altura de
5,5 metros era solo una declaración de las intenciones del autor: el
dispositivo no tenía motor ni transmisión. Con esto, el gigante de
hierro no pudo realizar ningún trabajo útil, excepto mover a una o dos
personas fuera de la carretera. A los militares no les gustó la idea. En
primer lugar, el dispositivo resultó ser muy notable. En segundo lugar,
era potencialmente muy inestable: no había forma de crear un sistema de
estabilización progresivo en ese momento. Y en tercer lugar,la falta de
una plataforma de carga limitó seriamente la funcionalidad militar de
la máquina Mosher. Incluso dos manipuladores, que el ingeniero propuso
integrar en la estructura, no ayudaron, lo que hizo que el aparato
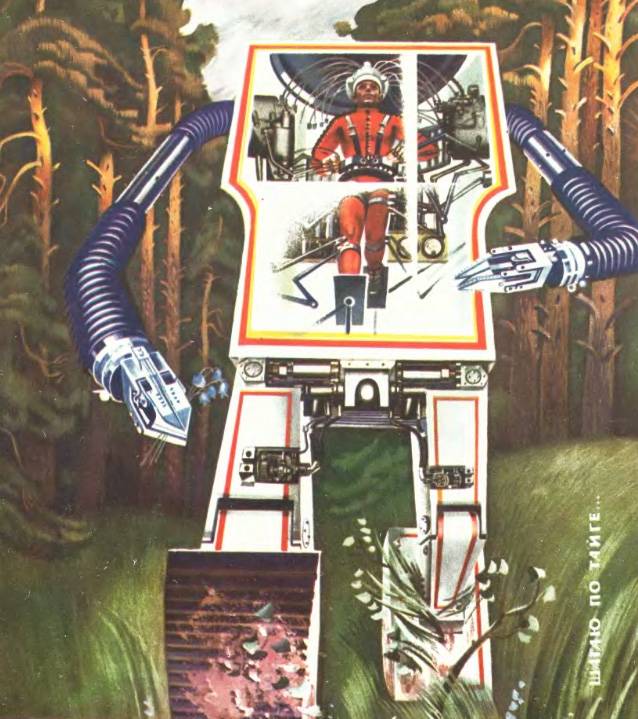
pareciera un dinosaurio depredador. Curiosamente, en la Unión Soviética,
los futuristas también se dejaron llevar por los pedipuladores bípedos:
en 1974, en una de las revistas científicas populares (presumiblemente
"Tekhnika Molodoi"), apareció una imagen de una máquina que se parecía
mucho a la muerte de Mosher. -conceptos finales. En la interpretación
soviética, el control de movimiento se llevó a cabo a través de una
interfaz neuronal.que en la Unión Soviética, los futurólogos también se
dejaron llevar por los pedipuladores bípedos - en 1974 en una de las
revistas de divulgación científica (presumiblemente "Tekhnika Molodoi"),
apareció una imagen de una máquina que se parecía mucho al callejón sin
salida de Mosher conceptos. En la interpretación soviética, el control
de movimiento se llevó a cabo a través de una interfaz neuronal.que en
la Unión Soviética, los futurólogos también se dejaron llevar por los
pedipuladores bípedos - en 1974 en una de las revistas de divulgación
científica (presumiblemente "Tekhnika Molodoi"), apareció una imagen de
una máquina que se parecía mucho al callejón sin salida de Mosher
conceptos. En la interpretación soviética, el control de movimiento se
llevó a cabo a través de una interfaz neuronal.
Fantasías soviéticas sobre robots bípedos. Fuente: cyberneticzoo.com
Por lo tanto, Mosher vio una solución al problema de la permeabilidad de los vehículos militares. Fuente: cyberneticzoo.com
La
experiencia con las máquinas para caminar de dos patas se incorporó al
desarrollo del vehículo Walking Truck en 1969. El desarrollo todavía
tiene un par de varios nombres: Cybernetic Anthropomorphous Machine y
Quadruped Transporter. Con un alto grado de confianza, el automóvil se
llama el abuelo del perro robot moderno Spot de Boston Dynamics. El
proyecto Mosher recibió una amplia financiación de DARPA y TARDEC
(Dirección de Blindados del Ejército de EE. UU.). Por cierto, los
militares mismos no pudieron recordar su propio proyecto de un camión
con el nombre largo: vehículo de cuatro patas ATAC. El proyecto no
avanzó más allá de los primitivos modelos de madera, y se decidió
centrar los esfuerzos en la idea de Mosher. Sugirió mover la cabina del
conductor al centro de la base del camión, dejando poco espacio para la
plataforma de carga.Sin embargo, esta vez se trató de desarrollar un
prototipo funcional.
El ejército estadounidense también ha estado trabajando en un camión ambulante. No funcionó muy bien. Fuente: cyberneticzoo.com
El
Walking Truck era un transportador de cuatro patas de 1,3 toneladas
capaz de transportar aproximadamente 270 kg de carga útil junto con el
operador. La planta de
energía era un motor de gasolina de 90 caballos de fuerza, que
teóricamente se suponía que aceleraba el automóvil a 55 km / h. Pero esto es en teoría, pero en la práctica estaba limitado a 8 km / h. Incluso esta velocidad se logró con grandes reservas. Se
trata del sistema hidráulico, que requiere al menos 250 litros de
aceite, que simplemente no tenía dónde colocar, por lo que el camión se
movió con una correa de varias mangueras de aceite. Y la presión en la "hidráulica" varió de 163 a 220 atmósferas.
Walking Truck en varias etapas de desarrollo. Fuente: cyberneticzoo.com
También
hubo dificultades con la estabilidad de la mula de hierro de 4,5
metros. Cuando sacaron el coche de Mosher a dar un paseo al aire libre,
estaba equipado con barras antivuelco. Esto, por supuesto, no agregó
ninguna maniobrabilidad o capacidad de carga al camión.
Pero
las mayores dificultades aguardaban al operador de esta asombrosa
máquina de cuatro patas. Una persona tenía que manipular simultáneamente
todas las extremidades para simplemente poner el pie del Walking Truck
en un escalón. Al mismo tiempo, el caballo de hierro vibraba
constantemente, crujía, se tambaleaba y amenazaba con volcarse. En
general, después de media hora de tal trabajo, el aparato vestibular del
operador falló.
Todas
estas dificultades se iniciaron solo para caminar libremente sobre
cuerpos de agua poco profundos, empujar jeeps ligeros fuera del lodo y
escalar baches empinados con éxito variable (si el Walking Truck no
gira). Como resultado, el Pentágono, al evaluar el potencial para crear caballos de hierro, rechazó más fondos. Y el sector civil no necesitaba tales delicias en absoluto.
Ahora se puede encontrar un ejemplo único de un camión andante en la exposición del Museo Americano de Transporte Militar.
Uno
de los componentes principales de las fuerzas navales alemanas durante
la Guerra Fría fueron numerosas combinaciones de barcos de combate -
torpedos, y desde mediados de los años 70 del siglo pasado - misiles,
cuyo propósito era contrarrestar barcos de la Armada de la URSS y flotas
de otros Varsovia. Países del pacto en el Mar Báltico. A
partir de 1990, la Bundesmarine tenía un total de cuarenta barcos de
misiles de los proyectos 143, 143A y 148, integrados en cuatro
escuadrones. Los cambios
políticos que tuvieron lugar a finales del siglo XX se reflejaron en las
tareas de la Armada de la ahora unida Alemania. La probabilidad de un conflicto armado en el Báltico se ha reducido drásticamente. Pero
también hay nuevas tareas: patrullar como parte de las fuerzas de la
coalición en áreas remotas, participar en operaciones antiterroristas. Involucrar a los cohetes para esto fue un paliativo. Aunque
los barcos relativamente pequeños del Proyecto 143/143A han tenido un
buen desempeño en el patrullaje del Estrecho de Gibraltar e incluso en
el Océano Índico frente a la costa de Somalia, todavía carecían de
navegabilidad y autonomía. Por
lo tanto, ya en la primera mitad de la década de 1990, el programa de
desarrollo de la Armada alemana "Marine-2005" formuló requisitos
generales para nuevos tipos de barcos, que deberían reemplazar a los
barcos de misiles que envejecen gradualmente. Se
concluyó que la clase anterior no podría cumplir con estos requisitos,
por lo que los nuevos barcos se clasificaron como corbetas. Debían volverse más versátiles, con mayor autonomía y capacidad para defenderse. Este
último requisito se consideró particularmente importante, ya que al
salir del Báltico, los barcos de la Bundesmarine salieron de debajo del
"paraguas" de su propio avión.
Diseño
Los
requisitos conceptuales para los nuevos barcos se formularon en 1995.
En general, eran bastante vagos e incluían solo una lista de tareas que
debían resolver las corbetas. Se dio prioridad al patrullaje de las aguas marítimas y al combate de los buques de superficie. Al mismo tiempo, la navegabilidad y la autonomía del buque iban a permitirle operar en todos los mares que bañan Europa. Como
la probabilidad de hostilidades en alta mar se consideraba baja, las
corbetas debían optimizarse para la acción en aguas costeras. Tareas relacionadas incluidas:
participación en operaciones de mantenimiento de la paz, especialmente en las denominadas "Crisis", que amenaza con intensificar las hostilidades;
control de rutas marítimas, apoyo al bloqueo naval en caso de imposición de sanciones a un país;
la lucha contra el terrorismo y la piratería en aguas costeras;
gestión de un grupo de buques de guerra;
derrota de objetivos costeros;
ajuste mín.
Al
mismo tiempo, no se especificó ni la composición de armamentos y
equipos radioelectrónicos, ni el esquema de la planta de energía, ni la
construcción del edificio. Como resultado, entre los bocetos presentados para su consideración, había opciones bastante exóticas. En
particular, uno de ellos preveía la creación de un catamarán de
aproximadamente 70 m de largo y un desplazamiento de 1400 toneladas, el
otro, un aerodeslizador en un aerodeslizador de 74 m de largo y un
desplazamiento de 1300 toneladas. Pero
el cliente mostró un sano conservadurismo, y hasta la segunda etapa de
desarrollo, que comenzó en diciembre de 1996, solo permitió proyectos de
barcos tradicionales de casco único con diesel UE. A
principios de enero de 2000, ambos competidores presentaron formalmente
sus propuestas a la Oficina Federal de Equipos y Órdenes Militares (BWB
- Bundesamt für Wehrtechnik und Beschaffung). Luego de analizar los
aspectos técnicos y financieros, el 17 de julio de 2000, el consorcio
ARGE K130 fue declarado ganador. En octubre del mismo año,
representantes de la BWB y el consorcio ganador firmaron un acuerdo
preliminar para construir una serie de cinco corbetas. Aprobación en el
comité de presupuesto del parlamento por más de un año. No fue sino
hasta el 12 de diciembre de 2001 que los parlamentarios aprobaron. Justo
al día siguiente, se firmó un contrato por valor de 880 millones de
euros y el programa de construcción de corbetas entró en la etapa de
implementación práctica. En total, se planeó construir 15 corbetas del
proyecto K130 para 2015 en tres series de cinco unidades.Pero en enero
de 2004, el gobierno alemán decidió, debido a dificultades financieras,
limitarse a una serie, posponiendo indefinidamente la construcción de
las corbetas restantes.
Diseño de barcos
El
concepto general del K130 estuvo influenciado por proyectos anteriores
implementados por la industria de construcción naval alemana y ganó
popularidad en los mercados mundiales. En
primer lugar, se trata de fragatas y corbetas de la serie MEKO A
(especialmente MEKO A100) desarrolladas por Blom und Foss y corbetas de
exportación de la empresa Lurssen. Las nuevas corbetas de la Bundesmarine tienen un diseño tradicional de casco único. El
tonelaje total será de 1840 toneladas, mientras que las reservas para
actualizaciones posteriores serán de aproximadamente 110 toneladas.La
longitud del casco - 89,12 m (línea de flotación - 82,80 m), ancho
máximo - 12,80 toneladas (línea de flotación - 12,44 m) . El
casco está diseñado para garantizar una buena navegabilidad, por lo que
las corbetas del proyecto K130 podrán mantener la capacidad de combate
para la turbulencia marina hasta 5 puntos y la fuerza del viento hasta
12 puntos.
La formación de contornos K130 estuvo significativamente influenciada por el requisito de reducir la visibilidad del radar. Para este propósito, las paredes de la superestructura tienen formas rotas, las llamadas. "Forma de X", cuando la parte inferior de la pared lateral está inclinada hacia adentro y la superior hacia afuera. La cantidad de equipos instalados en la cubierta superior se mantiene al mínimo. Gracias
a estas medidas, el área EPR de la corbeta K130 corresponderá a una
figura similar del barco de misiles mucho más pequeño del proyecto 143.
Los diseñadores no se limitaron a reducir solo la visibilidad del radar,
prestando atención a la parte infrarroja de la espectro. Para
reducir el campo térmico, se inyecta agua de mar en los conductos de
escape de los motores, mucho más eficiente que la refrigeración por
aire. Los conductos de escape en sí están por encima de la línea de flotación. Esta decisión ha mejorado significativamente las condiciones para el despliegue de REO y armamentos.
El barco tiene una superestructura larga. En su proa hay un puente cerrado con una vista perfecta, casi circular. Al
mismo tiempo, el puente emplea solo a tres personas, lo que está
garantizado por el uso generalizado de la automatización de la
navegación. Inmediatamente detrás del puente hay un mástil de foque, y luego en la popa: lanzadores PKR y dos botes. Tanto la PU como las embarcaciones se cierran con baluartes, que se bajan si es necesario. En la popa de la superestructura hay un palo mayor y un pequeño hangar.
Debido al alto grado de automatización, la tripulación de la corbeta consta de solo 65 personas (incluidos 11 oficiales). Las viviendas se concentran en la proa del barco. Hay
un camarote individual para el comandante, el resto de los oficiales se
alojan en camarotes dobles, y los oficiales y marineros se alojan en
camarotes cuádruples y de seis plazas. Cada camarote y cabina está equipada con su propio baño.
La
autonomía del barco es de siete días, en principio bastante, dado que
las corbetas deberán operar lejos de las costas de origen. En este sentido, existe la posibilidad de reposición de reservas en el mar. El
buque cuenta con dos estaciones de recepción de carga en proa, por lo
que puede tomar combustible desde cualquier lado, o yendo a la estela
del petrolero. Esto le permite aumentar la autonomía a 21 días.
Planta de energía y sistemas generales de barcos.
Instalación eléctrica de corbetas del proyecto K130: diesel de dos ejes con tornillos de paso variable. La potencia total de los dos motores es de 14.800 kW (19.850 hp). Los motores diésel están montados sobre cimientos que absorben las vibraciones y el ruido. La velocidad máxima será de 26 nudos (bajo un diesel - 20 nudos). La velocidad de crucero de 15 universidades alcanzará las 4.000 millas.
Cuatro
generadores diesel con una capacidad de 550 kW cada uno proporcionan
cuatro fuentes de alimentación trifásicas a bordo (voltaje 440 V,
frecuencia 60 Hz).
El
control automatizado de la planta de energía lo proporciona el IMCS
(Sistema Integrado de Monitoreo y Control), diseñado por SAE sobre la
base de un sistema similar de fragatas del proyecto F124 ("Sachsen"). El
sistema proporciona control sobre el funcionamiento y la gestión de la
central eléctrica, el suministro de energía, la máquina de dirección,
los mecanismos auxiliares, así como los medios de lucha por la
supervivencia del barco. Gracias
a la arquitectura modular del sistema IMCS es posible el control desde
varias consolas ubicadas en diferentes partes de la nave.
Los
sistemas de drenaje y protección contra incendios se pueden controlar
tanto desde las consolas del IMCS como desde las consolas especiales en
los compartimentos. La
sala de máquinas está equipada con un sistema contra incendios de
presión constante controlado a distancia diseñado para usar tanto agua
como espuma contra incendios.
Los corbetas están equipados con un sistema de desmagnetización incorporado.
El diseño de los barcos K130 tiene en cuenta los requisitos de protección contra armas de destrucción masiva. En
particular, el sistema de ventilación está diseñado para el
mantenimiento a largo plazo del exceso de presión en las instalaciones
del barco. También hay un sistema de riego para descontaminar el barco.
El barco cuenta con dos plantas desaladoras con una capacidad de 4,8 metros cúbicos de agua por día. Para satisfacer las necesidades diarias de una instalación es suficiente, la segunda, un repuesto.
Armamento
El
calibre principal de la artillería de corbeta está representado por
"segunda mano": instalaciones de artillería de 76 mm "OTO Melara
Compact", desmanteladas de barcos de misiles, retiradas del combate. Estos sistemas se encuentran entre los más comunes en las flotas del mundo, pero al mismo tiempo no son nuevos. La
misma empresa italiana ofrece versiones más modernas de los sistemas de
artillería de 76 mm, pero para ahorrar dinero, la Bundesmarine decidió
limitarse a los sistemas más antiguos. Inicialmente,
se planeó instalar dos AU de 76 mm en las corbetas, pero luego
decidieron limitarse a la proa, instalando una segunda RAM PU SAM en
lugar de la popa.
en superficie de baja velocidad y costera - 4 km. Cada
AU MGL-27 está equipado con una unidad de observación individual de
Atlas Electronic, que incluye una cámara de televisión y de imágenes
térmicas, así como un telémetro láser.
El
principal delantero de las corbetas del proyecto K130 son los misiles
de crucero RBS-15 Mk3 desarrollados por la compañía sueca Saab Bofors
Dynamics AB. Este producto
es la última versión del famoso RCC sueco, que proporciona, a
diferencia de las modificaciones anteriores, un uso eficiente no solo
para fines marinos sino también costeros. RBS-15
Mk3 presenta la introducción del sistema de control del receptor GPS,
que aumentó significativamente la precisión de disparo, así como también
redujo el EPR y aumentó la resistencia a la interferencia. Es posible programar la ruta de vuelo. El guiado se lleva a cabo utilizando un cabezal de referencia de radar activo. El alcance alcanza los 200 km, la velocidad de vuelo: 0,9 M. La ojiva del misil pesa 200 kg. Cada corbeta recibió dos lanzadores de misiles RBS-15 Mk3 de doble contenedor montados en una cintura.
RAM SAM de la última modificación Block 1HAS (helicóptero, avión, barco) está destinado a la defensa aérea de corbetas. Como
se puede ver en la designación, esta versión del SAM le permite
alcanzar no solo objetivos aéreos sino también de superficie. El barco está equipado con dos PU de 21 cargas, en el tanque y en el techo del hangar para helicópteros. El complejo utiliza misiles guiados antiaéreos RIM-116A Mod 1.
Corvette
K130 está equipado con una plataforma de helicóptero bastante grande
para barcos de esta clase (24 m de largo), que le permite recibir un
helicóptero que pese hasta 12 toneladas ("Lynx" o NH-90). El
equipo de cubierta permite el reabastecimiento de combustible del
helicóptero, pero no se proporciona su base permanente en la corbeta. El pequeño hangar está diseñado para acomodar solo dos aeronaves pilotadas a distancia (UAV) del circuito de helicópteros. Además,
la cuestión de un tipo específico de avión sigue abierta: el
helicóptero no tripulado EADS/Dornier Simos, considerado uno de los
favoritos, se considera demasiado caro, y la Oficina Federal de Equipos y
Órdenes Militares ha anunciado una serie de pruebas comparativas de
otros aviones. . Finalmente, en 2018, de acuerdo con los resultados de la competencia, se eligió el dron SAAB V200 Skeldar.
A
diferencia de la mayoría de los otros barcos Corvette, los barcos K130
no tienen armas antisubmarinas, ni torpedos ni bombarderos. El
único medio de defensa antisubmarina es un helicóptero de cubierta,
pero, como ya se señaló, no se basará permanentemente en el barco.
Si
es necesario, las corbetas podrán colocar barreras contra minas: el
diseño prevé la posibilidad de instalar en la cubierta del helicóptero
cuatro pares de rieles para minas con una capacidad total de 34 minas.
Equipo electronico
El
sistema de información y control de combate (BIUS) para las corbetas
K130 fue desarrollado por un consorcio especialmente creado en 2001 "ET
Marinesiste GmbH". BIUS se
creó sobre la base de un sistema similar de fragatas como "Sachsen", y
eso, a su vez, sobre la base del BIUS holandés "SEWACO FD". Proporciona
una imagen de la situación de combate utilizando no solo sus propios
medios de observación, sino también la información transmitida desde
otros barcos y aeronaves a través de las líneas de datos "Link-11" y
"Link-16". Por supuesto, la propia corbeta podrá "compartir" información de sus sensores con otros consumidores. La arquitectura BIUS abierta facilitará en gran medida futuras actualizaciones y expansiones del sistema.
Para
mostrar la información hay siete consolas de operador "Tales" MOS Mk3,
ubicadas en el Centro de Información de Combate (BIC). Cada consola tiene dos pantallas de cristal líquido de 21 pulgadas. Además,
el BIC cuenta con cuatro estaciones de trabajo auxiliares, una tableta
grande y liviana y otros equipos de "oficina" necesarios.
El intercambio de información dentro del barco es proporcionado por dos sistemas de transmisión de datos: ATM, a través del cual se transmite la información más importante sobre la situación de combate, y "Ethernet", que proporciona la transferencia de otros datos.
El
principal medio de seguimiento de las condiciones del aire y de la
superficie es un radar de tres coordenadas con control electrónico de
haz EADS TRS-3D/16. Su antena de matriz en fase está montada en un mástil de pluma. El radar opera en el rango C y está integrado con el sistema de auto-reconocimiento MSSR-2000i. El radar implementa la capacidad de cambiar automáticamente el modo operativo de acuerdo con la situación táctica actual. Dependiendo del modo de operación del radar, el rango de detección de objetivos es de 30 a 200 km.
El
barco está equipado con dos radares de navegación "Petfinder ST Mk2"
con accesorios ARPA especiales diseñados para reducir el riesgo de
colisiones. Además del objetivo principal, estos radares se utilizarán para controlar el vuelo de helicópteros.
El
control de incendios lo proporcionan dos sistemas optoelectrónicos
Mirad, instalados delante del mástil de pluma y detrás del mástil
principal. Cada uno consta de dos cámaras de televisión (color y
monocromo), una cámara termográfica y un telémetro láser, montados en un
cabezal estabilizado que pesa 270 kg. El sistema Mirador proporciona
detección y reconocimiento de objetivos aéreos y de superficie a una
distancia de hasta 25 km, además de determinar la distancia a los
objetivos.
La
corbeta está equipada con un complejo de comunicación por radio, que
incluye, además de las estaciones de radio convencionales, una estación
de comunicación por satélite SATCOM rango decímetro, una terminal del
sistema comercial de comunicación por satélite "Inmarsat-V / M", así
como una estación de radio compatible con tropas terrestres requerido
para operaciones conjuntas. Todos
los medios de comunicación están integrados con el sistema de
distribución de datos IMUS, que brinda control de los medios de
comunicación, selección de su frecuencia, reconocimiento automático y
distribución de mensajes.
El
sistema de navegación de la corbeta incluye plataforma inercial,
receptores de sistema de navegación por satélite GPS/DGPS y sistema de
radionavegación Laurent-C, receptor de previsión meteorológica por
satélite, sensores meteorológicos, retraso electromecánico, sonda, carta
náutica digital ECDIS y piloto automático.
El barco del proyecto K130 está equipado con el sistema universal REB UL5000K. Proporciona
detección pasiva e identificación de fuentes de radiación
electromagnética, así como la creación de un mapa del entorno de
navegación sobre esta base. Además,
el registro de las características de radiación se registra en la base
de datos y la supresión de medios electrónicos hostiles mediante el
establecimiento de interferencia activa.
Dos
estabilizadores MASS (Multi Ammunition Softkill System), estabilizados
en dos planos, están diseñados para interferencia pasiva: uno frente al
puente en el lado de babor, el otro en el techo del hangar de
helicópteros en el lado de estribor. El
PU, desarrollado por Buk Neue Technologies GmbH, contiene ocho
cartuchos de cuatro proyectiles de 81 mm cada uno con trampas de
infrarrojos y reflectores de radar. El
sistema de interferencia pasiva se caracteriza por tiempos de respuesta
muy cortos y selección automática del algoritmo de interferencia
dependiendo de la naturaleza de la amenaza, situación táctica y
condiciones climáticas.
Construcción naval
Como
ya se mencionó, el consorcio ARGE K130 está construyendo barcos que
consisten en los astilleros Blom und Foss, Lurssen y Thyssen
Nordseeverke (TNSW). Cada astillero se encarga de fabricar secciones individuales del barco, suministrándolas a los socios. El montaje final del primer y cuarto barco lo realiza Blom und Foss, el segundo y quinto Lurssen y el tercero TNSW. Por una decisión especial del Bundestag, el astillero Peeneverft en Wolgast se conectó a la orden como subcontratista. Esta
decisión se explica por el deseo de atraer a la mayor cantidad posible
de empresas alemanas a lucrativos contratos militares, así como por la
línea del gobierno de apoyar la economía de las tierras orientales. Peeneverft suministró las secciones a otros astilleros, pero no finalizó las corbetas.
La
primera serie de corbetas recibió números de F260 a F264 y los nombres
de ciudades alemanas, y en este caso se "mantuvo" la proporción
necesaria: tres barcos recibieron el nombre de ciudades de Alemania
Occidental y dos, de Alemania Oriental. Los datos sobre el progreso de la construcción naval se dan en la tabla. Nótese
únicamente que el ciclo de construcción comienza unos meses antes del
marcador, es decir, la instalación en el atraque del primer tramo. Por ejemplo, el ensamblaje de las secciones de la corbeta F260 comenzó el 19 de julio de 2004.
Número
Nombre
Quilla
Botada
Alistada
F260
Braunschweig
03.12.2004
19.04.2006
16.04.2008
F261
Magdeburgo
19.05.2005
06.09.2006
22.09.2008
F262
Érfurt
22.09.2005
29 de marzo de 2007
28/02/2013
F263
Oldemburgo
19.01.2006
28.06.2007
21/01/2013
F264
Ludwigshafen am Rein
14.04.2006
26.09.2007
21/11/2013
El
lector atento, por supuesto, llamó la atención sobre el intervalo de
casi cinco años entre la puesta en servicio de las dos primeras corbetas
y las tres últimas (según el plan, los cinco barcos debían unirse a la
Bundesmarine a finales de 2009). El
hecho es que las pruebas de los primeros barcos revelaron una serie de
problemas técnicos, el más grave de los cuales fue el funcionamiento
poco confiable de las cajas de cambios de la empresa suiza MAAG. Llegó
al punto de que la empresa alemana "Rank" se ofreció a reemplazarlos
con sus propios productos, pero el cliente insistió en que los suizos
eliminaran las deficiencias. Y tomó tiempo... Incluso después de que los barcos se unieron a la flota, el proceso de finalizarlos continuó. Por
ejemplo, los misiles RBS-15 Mk3 fueron certificados para su uso en
corbetas solo en junio de 2016, y las pruebas del UAV Skeldar en la
corbeta Braunschweig comenzaron solo en 2020.
El mayor desarrollo de la serie K130 serían las corbetas del proyecto K131. Eventualmente, se transformó en el barco multipropósito MKS180, pero la implementación de este proyecto se retrasó. Además, durante el diseño de este barco "creció" significativamente y, en consecuencia, se volvió más caro. Y la Bundesmarine necesitaba no solo calidad sino también cantidad. Cabe
señalar que de las primeras cinco corbetas, solo dos barcos están en
pleno funcionamiento a la vez, y esto no se debe a problemas técnicos,
sino al proceso normal de entrenamiento y mantenimiento de combate (que
es, de hecho, información para la reflexión). ¿Cuántos barcos de una
clase necesita nuestra Marina para que puedan realizar al menos la
cantidad mínima de tareas?). Otoño 2016 La
ministra de Defensa alemana, Ursula von der Leyen, anunció un plan para
comprar con urgencia las segundas cinco corbetas K130 y establecer dos
centros de formación para entrenar a sus tripulaciones. El
Ministerio de Defensa iba a destinar 1.500 millones de euros para estas
necesidades (la primera serie costó a los contribuyentes alemanes 1.104
millones). El 21 de junio de 2017, esta decisión fue aprobada por el Comité de Presupuesto del Bundestag.
El Ministerio de Defensa tenía previsto firmar un contrato sin licitación con el consorcio ARGE K130. Pero German Naval Yards Kiel GmbH (GNY) intervino y protestó. Además,
resultó que los apetitos de ARGE K130 superan significativamente los
planes del Ministerio de Defensa, ¡para el consorcio de corbetas exigió
hasta 2,9 mil millones de euros! Finalmente,
el caso llegó al Tribunal de Contrataciones Públicas de la Oficina
Federal Antimonopolio, que apoyó la posición de GNY. Como resultado del compromiso alcanzado, GNY recibió el 15% del valor del contrato.
La
segunda serie de corbetas K130 también se construye de forma modular,
pero el ensamblaje final de los cinco barcos lo lleva a cabo Lurssen
Werft. Al elegir los
nombres, se olvidó la corrección política: a los cinco barcos se les
dieron los nombres de ciudades ubicadas en tierras de Alemania
Occidental.
Número
Nombre
Quilla
Botada
Alistada
F265
Colonia
25/04/2019
30/10/2020
(2023)
F266
Emden
30/01/2020
F267
Karlsruhe
06/10/2020
F269
Augsburgo
13/07/2021
F269
Lübeck
(.12.2021)
(2025)
Las
cinco corbetas de la primera serie formaban parte del 1er Escuadrón de
Corbetas de la 1ra Flotilla Operacional (Einsatzflotille 1), que se está
formando en VMB Warnemünde. Este
escuadrón se formó el 29 de junio de 2006. El servicio de combate
comenzó en 2012, cuando Magdeburg salió a patrullar la costa libia como
parte de la misión UNIPIL. Desde entonces, una de las corbetas se ha localizado casi continuamente en el Mediterráneo, el Mar Rojo o el Golfo de Adén. Este viaje dura, por regla general, un año, ya veces más (en junio de 2016, "Erfurt" regresó de una campaña que duró 17 meses). Las tripulaciones cambian cada cuatro meses. Campañas
tan largas muestran de manera convincente que los alemanes lograron
lograr un alto nivel de confiabilidad de sus corbetas.
***
En
las corbetas del proyecto K130 vemos la materialización de un concepto
cada vez más relevante de buque polivalente para la acción en aguas
costeras, a menudo alejadas de sus propias bases. La
corbeta está armada con artillería estándar para barcos de esta clase,
tiene un buen SAM de corto alcance, así como modernos misiles antibuque
con la capacidad de disparar a objetivos en la costa (aunque la munición
PKR no es demasiado grande, solo cuatro unidades ). Extremadamente
inusual es la falta total no solo de armas antisubmarinas, sino también
de medios para detectar objetivos submarinos. Probablemente,
esto debería considerarse un error de los diseñadores alemanes, porque
los submarinos de muchos países ahora se están desarrollando activamente
y la cantidad de países que tienen submarinos modernos está creciendo
rápidamente. Además, a diferencia del LCS estadounidense o el Visby sueco, no es posible instalar equipos de acción contra minas. Un
inconveniente importante es la falta de la capacidad de establecer una
base permanente en un helicóptero "normal" (tripulado), aunque bien
podría proporcionarse, incluso aumentando un poco el tamaño de la nave. Después de todo, en operaciones en áreas remotas, un helicóptero sería completamente innecesario.
El equipo electrónico de a bordo de la corbeta es bastante moderno. Nótese la presencia de un BIUS altamente eficiente y un completo sistema de REB. Si se adopta el UAV, el barco podrá proporcionar orientación sobre el horizonte por sí mismo.
El buque cuenta con eficaces sistemas de soporte vital para la tripulación y protección contra armas de destrucción masiva.
En
general, la construcción de corbetas tipo Braunschweig enfatiza la
reorientación de la Bundesmarine hacia operaciones fuera de las aguas
tradicionales (Mares Báltico y del Norte). Por supuesto, en este sentido, las corbetas se han convertido en un digno reemplazo de los cohetes. Sin embargo, su número aún no corresponde al alcance de las tareas que enfrenta la Bundesmarine.
Al desatarse la guerra, el capitán de corbeta Alberto Philippi era el segundo jefe de la Base Aeronaval Río Grande. Pero un aviador que había bautizado a su hijo Manfred, en honor al Barón Rojo, - von Richthofen, - no se iba a quedar detrás de un escritorio. Al igual que el legendario as de la aviación alemana (1892-1918) estaba dispuesto a morir en combate. Y más allá del apellido italiano y del argentinísimo sobrenombre "Mingo", este hijo de inmigrantes alemanes y nieto de un combatiente de la Primera Guerra Mundial ostentaba las clásicas características teutonas que tanto le sirvieron en el conflicto de Malvinas: disciplinado, ordenado, estricto, eficaz. Pero aún más clave fue su religiosidad sin fisuras. Incorporado voluntariamente al Escuadrón de Skyhawk A4Q, aquel 21 de mayo despegó rumbo al Estrecho de San Carlos con los tenientes Arca y Márquez de numerales. Un rato después los seguirían Sylvester, Rótolo y Lecour. Ya en Malvinas el terceto comenzó a descender sobre la Isla de los Pájaros. Las condiciones meteorológicas eran totalmente adversas: lluvia, techos bajos y visibilidad de apenas una milla. Lo cual significaba que una fragata podía lanzarle sus misiles mucho antes de que los pilotos la vieran. Lejos de desistir, Philippi ordenó conectar el master de armamento. Pasaron por el Cabo Belgrano, que lucía negro y amenazador, y antes de llegar a San Carlos divisaron los mástiles de una fragata detrás de una roca. Y la fragata los divisó a ellos, precipitándose a navegar a toda potencia hacia el centro del estrecho.
Mingo echó una última mirada al tablero. De las 5300 libras de combustible que cargaba el avión, necesitaba 5000 para ir y volver. Sólo le quedaban 300 libras para atacar y escapar. Iba al límite absoluto del JP1 y no se había previsto reabastecimiento en vuelo. Philippi ordenó dispersarse a sus numerales, para atacar desde distintos ángulos y al mismo tiempo complicarle a los brits la selección del blanco. El jefe de la escuadrilla fue el primero en impactar, tras lo cual escuchó la voz de Arca: «¡Muy bien, señor!”. Le había dado a la Ardent en la popa. Los aviadores navales arrojaron sus doce bombas MK82 en reguero y comenzaron el escape. Sin embargo, al ser atacada, la fragata había emitido todas las alarmas posibles y los dos aviones de su escolta, que la sobrevolaban a 10 mil pies de altura – y que habían fallado en su misión de prevenir el ataque - se lanzaron en picada sobre los argentinos. “¡Harrier,Harrier!” se escuchó la voz de Márquez.
-¿Cómo estabas en ese momento? -Con la adrenalina y el oxígeno al cien por ciento.
Philippi ordena eyectar las cargas externas que los demoran: tanques auxiliares y lanzadores de bombas. “Después de eso, el A4 se convierte en una mariposa”, me dice. Pero el Sidewinder L se muestra como implacable cazamariposas. Haciendo maniobras evasivas, Philippi observa que uno de los Harrier le dispara precisamente ese misil. El proyectil lo sigue por espacio de algunos segundos y explota debajo del avión volándole la cola. El A4Q tiembla y se encabrita. El piloto se da vuelta y ve que el Harrier se está acomodando para rematarlo con sus cañones. “Me dieron, me eyecto, estoy bien”, avisa lacónicamente por radio a sus camaradas. El manual del Skyhawk dice que hay que eyectarse a 150 nudos por hora, con las alas estabilizadas. “Hacerlo a 350 nudos te puede arrancar un brazo, o la cabeza”, me explica. Sin embargo, no quedaba otra, y Philippi tiró de la manija entre sus piernas. De los ocho aviones en servicio del Escuadrón, seis tenían el cohete eyector vencido. Por suerte, este funcionó igual. Estrellarse contra el aire a esa velocidad le provocó un desmayo. Cuando recuperó el conocimiento, estaba cayendo en paracaídas, inclinado hacia delante, viendo bajo sus pies el estrecho de San Carlos y alrededor suyo el combate entre aviones argentinos y británicos. Su primer pensamiento fue dar gracias a Dios. El golpe contra el agua fue durísimo. Afortunadamente, el paracaídas se recostó sobre las olas y lo arrastró hacia la costa. Cerca de ella se desembarazó de la tela y comenzó a nadar, pero debió luchar denodadamente contras las “kelps”; algas o cachiyuyos, que dieron nombre a los pobladores anglos de Malvinas (ver foto debajo sobre los kelps en el estrecho de San Carlos).
Algas kelpers
Llegó tan agotado, que tuvo que salir del agua gateando, no podía pararse. Muy cerca se encontraba escorado el mercante Río Carcarañá, que los ingleses atacaron el 16 de mayo, abandonado por su tripulación. Tirado exhausto en la arena veía pasar aviones de combate. El de Márquez había explotado en el aire, mientras que el de Arca, averiado, se dirigía hacia Puerto Argentino. A todo esto, Sylvester, Rótolo y Lecour habían rematado a la Ardent. Cuando recuperó el aliento, con su cuchillo de caza Puma White Hunter (ver foto debajo) cavó un pozo de zorro para pasar la noche. Cada tanto, el frío lo obligaba a levantarse y se calentaba haciendo más profundo su refugio.
Cuchillo Puma White Hunter
Alrededor de las dos de la mañana activó su señal de radio de emergencia, para que pudieran rescatarlo los efectivos propios. Pero al ser detectada por los ingleses, estos abrieron fuego contra el Río Carcarañá. Y los tiros cortos caían cerca de Philippi, quien decidió ponerse en marcha. Iba de cerro en cerro activando la señal. Desde uno de ellos vio al buque mercante despidiendo humo negro; lo habían convertido en un colador. Pasó la noche siguiente en un galpón de esquila. Con el revolver de supervivencia Smith & Wesson calibre 38 (ver foto debajo) mató una oveja y la asó en un fuego que prendió con su pistola de señales.
Revólver Smith & Wesson cal 38
Al tercer día, el 24 de mayo, avistó tres vehículos y les hizo señales apelando al espejo de supervivencia. Le pareció ver un jeep Mercedes Benz y dos Unimog del Ejército, pero al acercarse comprobó que se trataba de un Land Rover y dos tractores: eran kelpers. “Esto viene mal”, pensó, y reemplazó las balas luminosas de su revolver por balas de plomo. Se tranquilizó empero al ver que el principal del grupo le tendía la mano sonriente.
-Soy un piloto argentino derribado el día 21 y quiero volver con mi gente. Si nos ponemos de acuerdo, bien, y si no, sigan su camino, y yo seguiré el mío. -Lo vamos a ayudar. Usted es una persona de suerte. En esta zona, totalmente deshabitada, nosotros pasamos sólo un día cada seis semanas, para hacer rotación de ganado. Y hoy nos tocaba.
Quien así le respondió resultó ser Tony Blake, administrador de la estancia North Arm, de cien mil hectáreas de extensión. A partir de ese momento Philippi fue tratado a cuerpo de rey. Lo instalaron en el dormitorio del dueño, se bañó con jabón perfumado, fumó cigarrillos Rothmans, tomó whisky del mejor y degustó los exquisitos scones preparados por la esposa de Tony. “Me trataron igual que si fuera un piloto británico”, se admira. Más aún, Philippi encontró en Blake un alma gemela; tenían las mismas pasiones: la caza de puma, ciervo y jabalí, la pesca de trucha con mosca, el golf, ambos eran fanáticos radioaficionados y fotógrafos, y hasta poseían idéntica cámara, la Canon A1. A la mañana siguiente, Blake lo llevó a conocer la estancia y a sus empleados. Uno de ellos, conocido por su furibundo odio a los argentinos, al ver Philippi, se llevó la mano a la cintura debajo del abrigo. Blake se quedó helado, pensó que sacaría un arma para matar al piloto. El capataz, en cambio, extrajo una petaca de brandy y propuso brindar por dos razones:
“Porque usted se salvó, y por su día nacional, que se celebra hoy». Cuando al rato arribó el helicóptero de rescate argentino, despidiéndose, todos lloraban. -Mingo, ustedes estuvieron menos de 24 horas juntos, ¿cómo es que se pudo generar un afecto tan entrañable? -No tiene explicación.
Tony Blake le mandó un autito Matchbox al hijo de Philippi, Manfred, de tres años. Y la esposa del kelper, la receta de los scones a Graciela Philippi. La mujer del piloto, desde su casa aledaña a la Base, había visto despegar seis aviones y regresar sólo tres. Sin embargo, al darle la noticia de que su marido estaba desaparecido, el jefe del Escuadrón le dijo: «Arca vio un paracaídas. Si era el de Mingo, conociéndolo, te aseguro que va a aparecer”. Efectivamente, siete días después Graciela lo tenía entre sus brazos. Tony Blake visitó a Philippi en la Argentina, y hasta llevó una ofrenda floral al cenotafio de Puerto Belgrano, demostrando un gran sentimiento por nuestros caídos. Philippi, en cambio, a pesar de la insistencia en invitarlo de su amigo kelper, sostiene que iría a Malvinas de una sola manera: “Por la puerta grande, en un avión de la Armada”.
-¿Mingo, qué es lo que te permitió sobrellevar tamaña odisea, a los 43 años, con todo en contra, si ni siquiera saliste con el avión del comandante, que tenía navegador?
-El buen adiestramiento, desde ya. Pero sobre todo los tres axiomas que me acompañaron siempre. Son tres párrafos de la Biblia: "Ayúdate y Dios te ayudará", "Ni una hoja cae si no es la voluntad del Señor" y "Dios es mi pastor, nada me faltará. Aunque ande en el valle de sombras de muerte, no temeré mal alguno, Tú estarás conmigo…". Esas palabras retumbaban en mi cabeza.
-¿En esos momentos difíciles? -En todos los momentos, la vida entera, hasta el día de hoy. Y Dios siempre apartó el daño que aparecía por delante, siempre me despejó el camino.
Conocí a Philippi cuando lo evacuaron a Puerto Argentino. Obviamente quise entrevistarlo, pero se negó. Años después lo crucé en Bahía Blanca y dijo que me debía esa nota. Hoy ya no me la debe…
¿Quién inventó el barrido de alas variable? Barnes Wallis? Quizás no, para Messerschmitt Me de Voigt. El prototipo de la P. 1101 debe ser la base, no solo de una idea de ala variable y barrida, sino también de un diseño de caza monoplaza con motor de conductos y barrido pronunciado. El hecho de que la "copia" americana que era el Bell X-5 pareciera idéntica no fue por accidente, ya que el Me P. 1101 también fue incautado y enviado de regreso a Estados Unidos. Curiosamente, gran parte de la investigación Messerschmitt P. 1101 de Voigt cayó en manos francesas, quienes, a diferencia de los británicos, no tuvieron necesidad ni remordimiento de entregárselas a los estadounidenses y se negaron a hacerlo. El Me P. 1101 no estuvo exento de problemas, era demasiado pesado para un diseñador de planeadores como Willi Messerschmitt y el barrido del ala de 40 °, con el mecanismo de ala variable o `` swing-wing '' propuesto, desafió la solución en el perro mal financiado. días de una guerra a punto de terminar. Sin embargo, con su diseño de engranajes con geometría de ala montada internamente, el P. 1101 señalaría el uso exitoso de este tipo en la década de 1960. Por lo tanto, el P. 1101 no sería un arma maravillosa de último momento, y no era adecuado para una construcción tosca y una vida útil corta de la estructura del avión. Sin embargo, dentro del Me P. 1101 se encuentran muchas tendencias de diseño futuras; el P. 1101 todavía parece un fuselaje de los años 80.
Curiosamente, aunque no es de sorprender, el diseñador jefe de Bell Aircraft Corporation, Robert Woods, se encontró de pie en un granero en Oberammergau, a principios de 1946, mirando el Me P. 1101. Era, por supuesto, un trabajo costoso y difícil. viaje desde los Estados Unidos hasta las colinas del sur de Alemania, pero alguien tenía que hacerlo. El consiguiente Bell X-5 fue, incluso para el observador más pro estadounidense, una supuesta copia descarada. Otros cazas de ala en flecha estadounidenses de la década de 1950 parecen cruces entre el Me P. 1101 y el Multhopp Ta 183. Al hacerlo, se enfrentarían a los MiG-15 que también eran copias descaradas del diseño alemán.
Aunque en última instancia no tuvo éxito en términos de copia directa, el efecto del Me P. 1101 también llevaría a su diseñador, W. Voigt, a encontrarse en Wright Field, Dayton, Ohio, en 1946, de ahí a una carrera en la industria aeroespacial de EE. UU. industria. Y la P. 1101 tampoco iba a ser la última aventura de Messerschmitt en términos de diseño, porque la ruta definitiva que debía tomar el diseño avanzado de Messerschmitt era la de todas las alas. De la P. 1101 surgió la P. 1102 como una idea de ala sin cola (con aleta vertical) y una serie de propuestas de fuselajes de alas y propulsión a reacción diseñadas para enfrentar las últimas luchas finales del Reich por un arma que infundiera miedo en los estadounidenses. corazones.
Messerschmitt no había sido un ávido seguidor de las alas y sus pensamientos sobre el diseño sin cola incluían una aleta vertical o "cola", pero no una unidad de cola estabilizadora horizontal que indujera la resistencia. Sin embargo, como diseñador de planeadores antes de sus diseños de motor, Messerschmitt había estado atento a los Hortens y Lippisch. En última instancia, las propuestas de diseño de la P. 1111/12 de principios de 1945 fueron ideas avanzadas de todas las alas y, de nuevo, parece una iteración temprana de una idea británica posterior, el DH 108 y el Northrop X-4 estadounidense. También en este caso, en la P. 1112, vimos por primera vez el concepto anular, raíz de ala / borde de ataque / entrada de aire del motor, que luego se vio en el cometa de Havilland, Vickers V.1000 y Valiant, y en producción. en el Handley Page Victor, así como en una gran cantidad de máquinas estadounidenses.
Del primer caza a reacción de alas barridas del mundo Me 262 (y el Me 262 HG aún más aerodinámico), podemos decir que este fuselaje enseñó a otros más sobre las alas y el vuelo a alta velocidad de lo que se puede comprender fácilmente. El trampolín Me 262 fue un momento monumental de aprendizaje para los aliados que lo tomaron y su tecnología. Durante la noche, los jets de alas rectas de De Havilland, Gloster, Lockheed y otros, fueron completamente redundantes, arrojados al cubo de la basura del diseño. Es posible que el vampiro no se haya vuelto inútil, pero podemos decir que tenía una capacidad restringida sin importar cuánto lo amaran. De Havilland pronto diseñó el DH 101 y el DH 108 clave y luego el DH 110 Vixen. Glosters, Lockheed, North American et al, todos se fueron de la noche a la mañana. Para los británicos, el Hawker P. 1067 Hunter se convirtió en la máquina de sus sueños de alas barridas, a pesar de su tecnología "prestada".
Planforms en forma de media luna: el avance a menudo olvidado
La idea de un ala en forma de media luna barrida hacia atrás se vio en las obras de los primeros pioneros, no menos Weiss y Handley Page, pero un ala en forma de media luna invertida en forma de planta, una en la que el barrido se reducía hacia las puntas de las alas, se formó en Alemania. y aplicado por la empresa Arado y su diseñador jefe, Walter Blume, el suplente Hans Rebeski, y el aerodinámico Rudiger Kosin. Kosin había estudiado el barrido hacia adelante y hacia atrás variable. Arado propuso un bombardero con dos alas en media luna y luego con cuatro motores con un ángulo de retroceso de 37 ° en el ala interior y dos manivelas a 29 ° y 25 ° hacia la sección del ala exterior.
Los beneficios del compromiso de un ala creciente fue la reducción en el barrido del ala cerca de las puntas del ala y que movió la carga en las puntas del ala hacia adelante del eje del ala y mejoró el flujo de aire cerca de las puntas, en lugar de degradarlo. Esto también redujo el comportamiento desfavorable cerca de la pérdida y en números de Mach altos, pero mantuvo las ventajas del barrido en general. De este modo, se redujeron los riesgos de atascamiento de la punta y de hilado a baja velocidad y se creó una máquina de mejor manejo. El ala podría tener que ser un poco más fuerte y las puntas de las alas más delgadas para garantizar un buen flujo de aire, pero el ala creciente sería de construcción más liviana que un ala delta y proporcionó otra solución a la forma en que se podrían hacer alas largas, delgadas y altamente barridas. para trabajar y hacerlo de forma segura en el gráfico de velocidad, no solo a alta velocidad y gran altitud. Es de interés que las "torceduras" en el movimiento variable del ala creciente no parecen producir perturbaciones localizadas significativas del flujo de aire.
Hay poca sorpresa en las afirmaciones de la compañía británica Handley Page que construyó el magnífico bombardero Victor con su ala creciente, que dice que comenzó a investigar el ala creciente en 1946. Sin embargo, omite mencionar que solo unos meses antes , en abril de 1945, los británicos habían recogido muchos dibujos y datos de investigación sobre el diseño del ala creciente de la compañía Arado y su aerodinámico Kosin, en Berlín, cuando las tropas británicas y los expertos que la acompañaban tomaron la fábrica de Arado. En 1946, Handley Page estaba analizando esos datos y, en 1951, proponía un bombardero con alas en forma de media luna, que se convirtió en el "Víctor", que también usaba motores enterrados con cola en T y raíz de ala.
¿Qué pasa con las alas más rectas, menos barridas o incluso no barridas, seguramente no podrían ofrecer las ventajas aerodinámicas del ala barrida? La ciencia pronto reveló que después de los beneficios de un ala en flecha a velocidad supersónica, una forma de ala (casi) sin barrido, corta y con una relación de aspecto baja podría, con un perfil aerodinámico muy delgado (tan delgado como un 3 o 4 por ciento de espesor / relación de cuerda), también ofrecen menor resistencia supersónica. Tales alas de "trozo" provienen en parte del aprendizaje del ala de trozo corto aplicado a los cohetes de von Braun. A Mach 1,5, la resistencia más baja provino de un ala muy barrida, pero la siguiente resistencia más baja podría, dijeron los expertos, provenir de un ala pequeña, no barrida que, en lugar de retrasar la compresibilidad, simplemente `` luchó '' a través de ella hacia el ventaja del flujo de aire supersónico.
Fue en las velocidades de aproximación y aterrizaje que las alas de sección aerodinámica tan barridas y sin barrido, pero también delgadas, se volvieron problemáticas, a menos que se usaran velocidades de aterrizaje peligrosamente altas, de empuje y de combustible. Se pueden usar todo tipo de aletas y listones que generen sustentación, pero en última instancia, arrastre e induzcan peso. ¿Pero seguramente las ventajas de un todo-ala moderadamente barrido podrían resolver todos estos temas conflictivos?
En términos de la revolución del motor, los gustos de Flight y el Sr. Keith-Lucas, también postularon sobre dos temas de gran importancia, dada la fecha de 1952. El primero fue la sugerencia de Keith-Lucas de que se podría usar el empuje / escape del motor giratorio. para ayudar al aterrizaje y el segundo era ¿qué tipo de fuselaje podría albergar un reactor atómico? Un avión de propulsión atómica requeriría un gran receptáculo profundo para albergar el reactor. ¿Era la respuesta el hidroavión de casco profundo con todo su espacio interno para un enorme motor atómico? ¿O era el receptáculo más probable para una central eléctrica atómica la caja de ala profunda de una enorme máquina de alas?